Patent for a Robot That Drives and Flies

ECE Associate Professor Alireza Ramezani received a patent for a “Multi-modal mobility unmanned vehicle.”
Abstract Source: USPTO
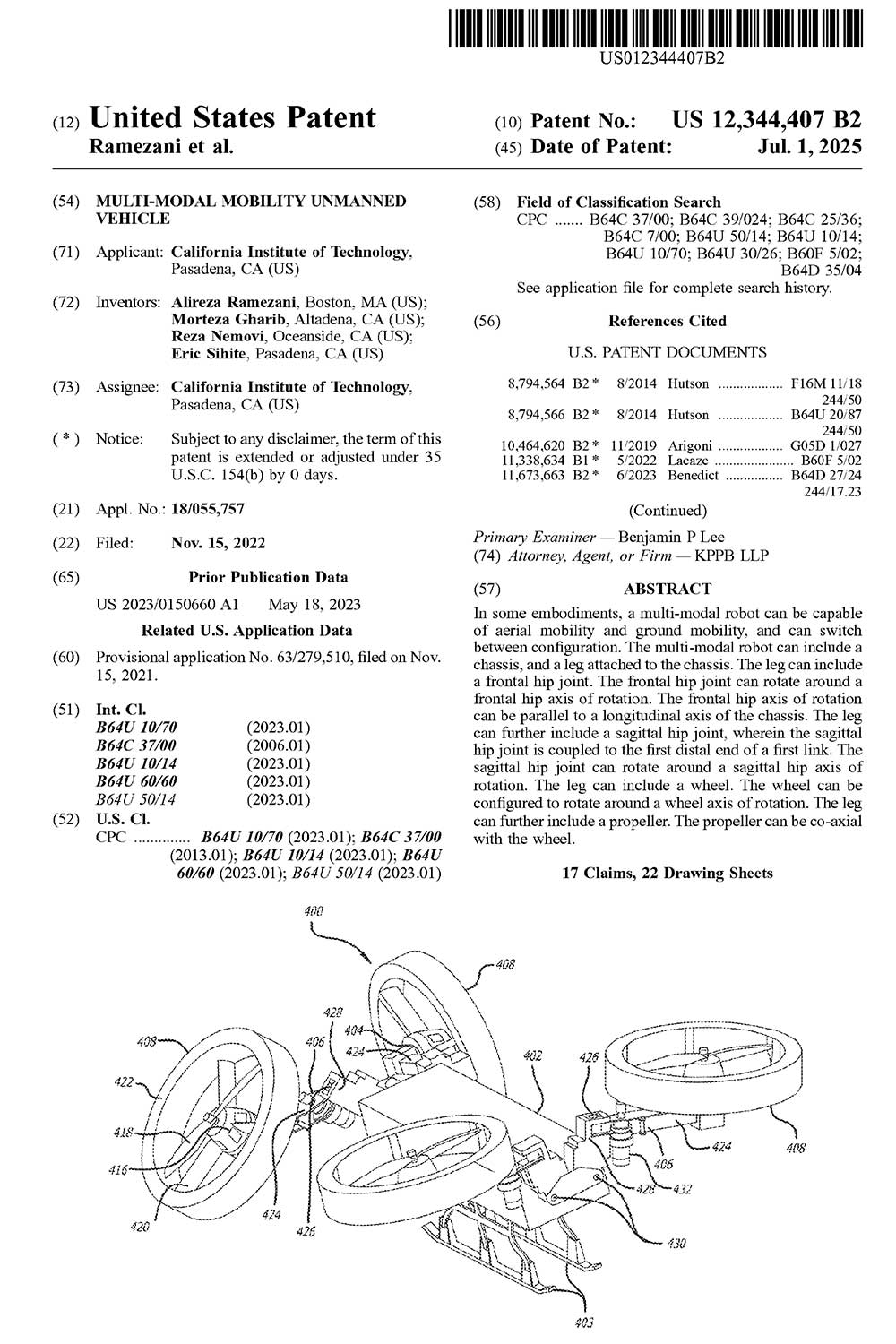
In some embodiments, a multi-modal robot can be capable of aerial mobility and ground mobility, and can switch between configuration. The multi-modal robot can include a chassis, and a leg attached to the chassis. The leg can include a frontal hip joint. The frontal hip joint can rotate around a frontal hip axis of rotation. The frontal hip axis of rotation can be parallel to a longitudinal axis of the chassis. The leg can further include a sagittal hip joint, wherein the sagittal hip joint is coupled to the first distal end of a first link. The sagittal hip joint can rotate around a sagittal hip axis of rotation. The leg can include a wheel. The wheel can be configured to rotate around a wheel axis of rotation. The leg can further include a propeller. The propeller can be co-axial with the wheel.